মানুষের
দৃষ্টি অনুমান কম্পিউটার দৃষ্টিভঙ্গি প্রধান গবেষণা এলাকায় এর
গুরুত্বের কারণ হল অ্যাপ্লিকেশনগুলির প্রাচুর্য যা এমন প্রযুক্তি থেকে উপকৃত হতে
পারে। এখানে গভীর শিক্ষার উপর ভিত্তি করে মানব পজিশনের
অনুমানে ব্যবহৃত বিভিন্ন কৌশলগুলির ভূমিকা রয়েছে।
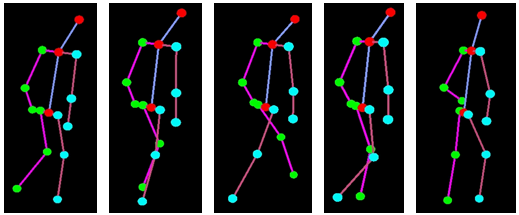
একটি হিউম্যান পোজ স্কেল্টন একটি গ্রাফিকাল বিন্যাসে একজন ব্যক্তির অভিযোজন প্রতিনিধিত্ব করে। মূলত, এটি সমন্বয়গুলির একটি সেট যা ব্যক্তিটির অবস্থান বর্ণনা করার সাথে যুক্ত হতে পারে। কঙ্কাল প্রতিটি সমন্বয় একটি অংশ (অথবা একটি যৌথ, বা একটি keypoint) হিসাবে পরিচিত হয়। দুটি অংশের মধ্যে একটি বৈধ সংযোগ একটি জোড়া (বা একটি অঙ্গবিন্যাস) হিসাবে পরিচিত হয়। উল্লেখ্য, সব অংশ সমন্বয় বৈধ জোড়া বৃদ্ধি দেয় না। একটি নমুনা মানুষের মাথা কঙ্কাল নীচে দেখানো হয়।

বাম: মানুষের জন্য COCO keypoint বিন্যাস skeletons পোজ। রাইট: রেন্ডার্ড মানব skeleton pose। (সূত্র)
একজন ব্যক্তির অভিযোজন জানাতে বিভিন্ন বাস্তব জীবনের অ্যাপ্লিকেশনের জন্য পথ খোলা হয়, যার মধ্যে কিছু এই ব্লগের শেষ দিকে আলোচনা করা হয়। হিউম্যান পোজ আনুমানিক কয়েকটি পদ্ধতির মধ্যে বছর ধরে চালু করা হয়। প্রাথমিকতম (এবং ধীর গতির) পদ্ধতিগুলি সাধারণত এমন একটি চিত্রের একক ব্যক্তির অবস্থানের অনুমান করে যা কেবলমাত্র একজন ব্যক্তির সাথে শুরু হতে পারে। এই পদ্ধতিগুলি প্রথমত পৃথক অংশগুলি সনাক্ত করে, পরে তাদের তৈরি করার জন্য সংযোগ তৈরি করে।
স্বাভাবিকভাবেই, এই পদ্ধতিগুলি অনেক বাস্তব জীবনে দৃশ্যমান নয় যেখানে চিত্রগুলি একাধিক ব্যক্তি ধারণ করে।
Multi-Person Pose Estimation মাল্টি ব্যক্তি অনুমান করা
মাল্টি-পার্সন পোজ অ্যানিমেশনটি একক ব্যক্তির ক্ষেত্রে তুলনায় আরো কঠিন, কারণ একটি চিত্রের অবস্থান এবং লোকেদের সংখ্যা অজানা। সাধারণত, আমরা দুটি পদ্ধতির মধ্যে একটি ব্যবহার করে উপরের সমস্যাটি মোকাবেলা করতে পারি:
- সহজ পদ্ধতিটি একটি ব্যক্তি আবিষ্কারককে প্রথমে অন্তর্ভুক্ত করা, পরে অংশগুলি অনুমান করে এবং তারপরে প্রতিটি ব্যক্তির জন্য পজিশন গণনা করা হয়। এই পদ্ধতিটি শীর্ষ-ডাউন পদ্ধতির হিসাবে পরিচিত ।
- আরেকটি পদ্ধতি হল চিত্রের প্রতিটি অংশের (অর্থাৎ প্রতিটি ব্যক্তির অংশ) সনাক্ত করা, অনুসরণ করে স্বতন্ত্র ব্যক্তিদের অংশীদারি / দলবদ্ধকরণ। এই পদ্ধতি নীচে আপ পদ্ধতির হিসাবে পরিচিত হয় ।
সাধারণত, শীর্ষ-নীচের পদ্ধতিটি নীচে-ভিত্তিক পদ্ধতির চেয়ে বাস্তবায়ন করা সহজ, যেমন একজন ব্যক্তি ডিটেক্টর যোগদানকারী / গোষ্ঠী অ্যালগরিদম যোগ করার চেয়ে অনেক সহজ। ডিটেক্টর এবং অ্যাসোসিয়েটিং / গোষ্ঠী অ্যালগরিদমগুলির মধ্যে কোনটি ভাল, তা আসলেই কমিয়ে আনা হয়, যা কোন পদ্ধতির সামগ্রিকতর ভাল কর্মক্ষমতা আছে তা বিচার করা কঠিন।
এই ব্লগে, আমরা গভীর শেখার কৌশলগুলি ব্যবহার করে বহু-ব্যক্তি মানব দোষ অনুমানের উপর মনোযোগ দেব। পরবর্তী বিভাগে, আমরা এর জন্য কয়েকটি জনপ্রিয় শীর্ষ-ডাউন এবং নীচের দিকে দৃষ্টিভঙ্গি পর্যালোচনা করব।
গভীর শিক্ষণ পদ্ধতি
1. ওপেনপোজ
ওপেনপোজ আংশিকভাবে তাদের ভাল নথিভুক্ত GitHub বাস্তবায়নের কারণে মাল্টি-ব্যাক্তিগত মানবিক মূল্যের অনুমানের জন্য সর্বাধিক জনপ্রিয় অবলম্বন পদ্ধতির একটি ।
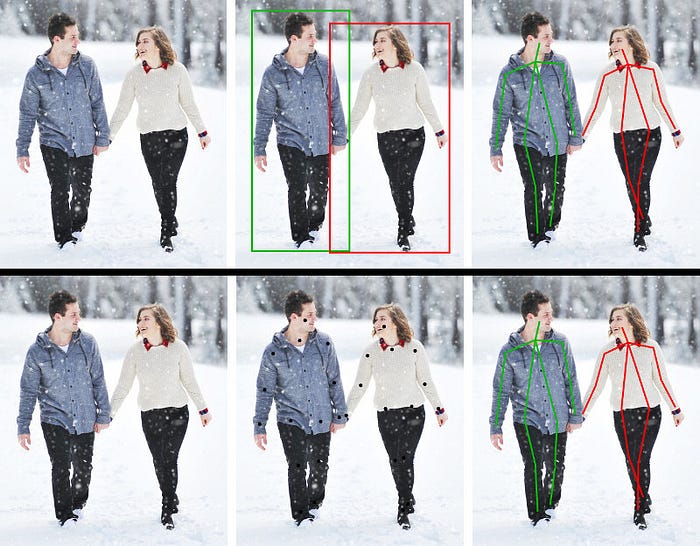
অনেক নিম্ন-পর্যায়ের পন্থা হিসাবে, ওপেনপোজ প্রথমে ছবির প্রত্যেকটি ব্যক্তির সাথে সম্পর্কযুক্ত অংশগুলি (কী পয়েন্ট) সনাক্ত করে, তারপরে পৃথক ব্যক্তিদের অংশগুলি নির্দিষ্ট করে। নিচে প্রদর্শিত হয় OpenPose মডেলের স্থাপত্য।
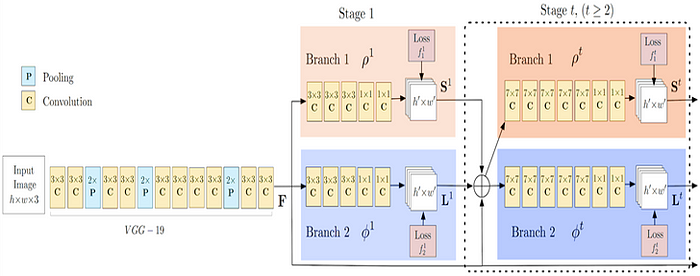
ওপেনপোজ নেটওয়ার্কটি প্রথম কয়েকটি স্তর (উপরের ফ্লোরচার্টে VGG-19) ব্যবহার করে একটি চিত্র থেকে বৈশিষ্ট্যগুলি উপরি করে। বৈশিষ্ট্য তারপর সংশ্লেষ স্তর দুটি সমান্তরাল শাখা মধ্যে খাওয়ানো হয়। প্রথম শাখাটি 18 টি আস্থা মানচিত্রের একটি সেট ভবিষ্যদ্বাণী করে, প্রতিটি মানচিত্র মানব দেহের কঙ্কালের একটি নির্দিষ্ট অংশকে প্রতিনিধিত্ব করে। দ্বিতীয় শাখা 38 অংশ অ্যাফিনিটি ফিল্ডস (PAFs) এর একটি সেট ভবিষ্যদ্বাণী করে যা অংশগুলির মধ্যে সংঘর্ষের ডিগ্রীকে প্রতিনিধিত্ব করে।
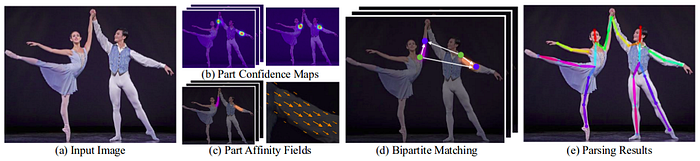
ধারাবাহিক পর্যায়ে প্রতিটি শাখা দ্বারা তৈরি পূর্বাভাস পরিমার্জন করা হয়। অংশ আস্থা মানচিত্র ব্যবহার করে, বাইপার্টাইট গ্রাফগুলি অংশগুলির জোড়াগুলির মধ্যে তৈরি হয় (উপরের ছবিতে দেখানো হয়েছে)। PAF মানগুলি ব্যবহার করে, বাইপার্টাইট গ্রাফগুলিতে দুর্বল লিঙ্কগুলি বাদ দেওয়া হয়। উপরের ধাপগুলির মাধ্যমে, মানব পোষাক skeletons আনুমানিক এবং ইমেজ প্রতি ব্যক্তির দেওয়া হতে পারে। অ্যালগরিদমের আরও পুঙ্খানুপুঙ্খ ব্যাখ্যা করার জন্য, আপনি তাদের কাগজ এবং এই ব্লগ পোস্টে উল্লেখ করতে পারেন ।
2. DeepCut
DeepCut মাল্টি-ব্যক্তি মানব দোষ প্রাক্কলন জন্য একটি নীচে আপ পদ্ধতির। লেখক নিম্নলিখিত সমস্যা সংজ্ঞায়িত করে টাস্ক approached:
2. DeepCut
DeepCut মাল্টি-ব্যক্তি মানব দোষ প্রাক্কলন জন্য একটি নীচে আপ পদ্ধতির। লেখক নিম্নলিখিত সমস্যা সংজ্ঞায়িত করে টাস্ক approached:
Dশরীরের অংশ প্রার্থীদের একটি সেট উত্পাদন । এই সেট ইমেজ প্রতি ব্যক্তির জন্য শরীরের অংশ সব সম্ভব অবস্থান প্রতিনিধিত্ব করে। শরীরের অংশ প্রার্থীদের উপরের সেট থেকে শরীরের অংশ একটি উপসেট নির্বাচন করুন।Cশরীরের অংশ ক্লাস এক সঙ্গে প্রতিটি নির্বাচিত শরীরের অংশ লেবেল । শরীরের অংশ শ্রেণীগুলি অংশগুলি যেমন "আর্ম", "লেগ", "টর্স" ইত্যাদি প্রতিনিধিত্ব করে।- একই ব্যক্তির অন্তর্গত পার্টিশন শরীরের অংশ।
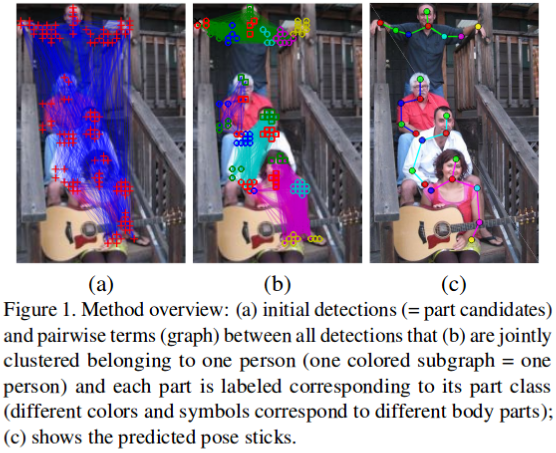
উপরের সমস্যাগুলি ইন্টিগ্রেশন লিনিয়ার প্রোগ্রামিং (আইএলপি) সমস্যাতে এটি মডেল করে যৌথভাবে সমাধান করা হয়েছে । এটি
(x, y, z) নীচের চিত্রগুলিতে বর্ণিত ডোমেনগুলির সাথে বাইনারি র্যান্ডম ভেরিয়েবলের ট্রিপলগুলি বিবেচনা করে মডেল করা হয় ।
দুই শরীরের অংশ প্রার্থীদের বিবেচনা করুন
d এবং d' শরীরের অংশ প্রার্থীর সেট থেকে D এবং ক্লাস c এবং c' ক্লাস সেট থেকে C। শরীরের অংশ প্রার্থীদের একটি দ্রুত RCNN বা একটি ঘন সিএনএন মাধ্যমে প্রাপ্ত করা হয় । এখন, আমরা বিবৃতি নিম্নলিখিত সেট বিকাশ করতে পারেন।x(d,c) = 1তারপর যদি শরীরের অংশ প্রার্থীdশ্রেণীর অন্তর্গত মানেc।- এছাড়াও,
y(d,d') = 1শরীরের অংশ প্রার্থীdএবংd'একই ব্যক্তির অন্তর্গত নির্দেশ করে। - তারা সংজ্ঞায়িত
z(d,d’,c,c’) = x(d,c) * x(d’,c’) * y(d,d’)। যদি উপরের মানটি 1 হয় তবে তার মানে শরীরের অংশীদার প্রার্থীdশ্রেণীভুক্তc, শরীরের অংশীদার প্রার্থীd'শ্রেণীভুক্তc', এবং অবশেষে শরীরের অংশ প্রার্থীd,d’একই ব্যক্তির অন্তর্গত।
শেষ বিবৃতি ব্যবহার করা যেতে পারে বিভিন্ন দলের অন্তর্গত পার্টিশন। স্পষ্টত, উপরের বিবৃতি লাইনার সমীকরণ হিসাবে ফাংশন হিসাবে প্রণয়ন করা যেতে পারে
3. আরএমপিই (আলফাপোজ)
আরএমইপি পজ অনুমানের একটি জনপ্রিয় শীর্ষ-ডাউন পদ্ধতি। লেখক মনে করেন যে শীর্ষ-ডাউন পদ্ধতিগুলি সাধারণত ব্যক্তি আবিষ্কারকের নির্ভুলতার উপর নির্ভরশীল, কারণ অঞ্চলের অবস্থান যেখানে অঞ্চলের অবস্থান নির্ধারণ করা হয়। অতএব, স্থানীয়করণ এবং সদৃশ আবদ্ধ বক্স ভবিষ্যদ্বাণী ত্রুটি ত্রুটি উপসর্গ আলগোরিদিম উপ-সর্বোত্তম সম্পাদন করতে পারে।
(x,y,z)। এইভাবে, ইন্টিগ্রেশন লিনিয়ার প্রোগ্রাম (আইএলপি) স্থাপন করা হয়, এবং একাধিক ব্যক্তির পজিশন অনুমান করা যেতে পারে। সমীকরণের সঠিক সেট এবং আরও বিশদ বিশ্লেষণের জন্য, আপনি এখানে তাদের কাগজটি পরীক্ষা করতে পারেন । 3. আরএমপিই (আলফাপোজ)
আরএমইপি পজ অনুমানের একটি জনপ্রিয় শীর্ষ-ডাউন পদ্ধতি। লেখক মনে করেন যে শীর্ষ-ডাউন পদ্ধতিগুলি সাধারণত ব্যক্তি আবিষ্কারকের নির্ভুলতার উপর নির্ভরশীল, কারণ অঞ্চলের অবস্থান যেখানে অঞ্চলের অবস্থান নির্ধারণ করা হয়। অতএব, স্থানীয়করণ এবং সদৃশ আবদ্ধ বক্স ভবিষ্যদ্বাণী ত্রুটি ত্রুটি উপসর্গ আলগোরিদিম উপ-সর্বোত্তম সম্পাদন করতে পারে।
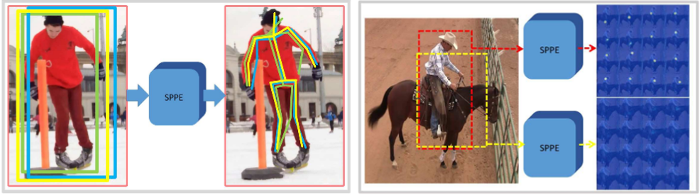
এই সমস্যার সমাধান করার জন্য, লেখকরা একটি ত্রুটিযুক্ত সীমানা বাক্স থেকে উচ্চ মানের একক ব্যক্তি অঞ্চলটি বের করার জন্য সিমমেট্রিক স্প্যাটিয়াল ট্রান্সফরমার নেটওয়ার্ক (এসএসটিএন) ব্যবহার করার প্রস্তাব দিয়েছেন। সেই ব্যক্তির জন্য মানব দেহের কঙ্কালটির অনুমান করার জন্য এই নিষ্কাশিত অঞ্চলে A Single Person Pose Estimator (SPPE) ব্যবহার করা হয়। একটি স্পটিয়াল ডি-ট্রান্সফরমার নেটওয়ার্ক (এসডিটিএন) ব্যবহার করা হয় আনুমানিক মানব দেহটিকে মূল চিত্র সমন্বয় পদ্ধতিতে ফিরিয়ে আনতে। অবশেষে, একটি প্যারামেটিক পোজ অ-সর্বাধিক সপ্রেশন (এনএমএস) কৌশল অনাদায়ী পস deductions সমস্যা পরিচালনা করার জন্য ব্যবহার করা হয়।
অধিকন্তু, লেখক প্রশিক্ষণ নমুনাগুলিকে উন্নত করার জন্য একটি পজিশন নির্দেশিত প্রস্তাব জেনারেটর উপস্থাপন করেন যা SPPE এবং SSTN নেটওয়ার্কে প্রশিক্ষণের জন্য আরও ভালভাবে সাহায্য করতে পারে। আরএমইপি এর প্রধান বৈশিষ্ট্যটি হল যে এই কৌশলটিকে সনাক্তকরণের জন্য আলগোরিদিম এবং SPPE এর যেকোন সংমিশ্রণে প্রসারিত করা যেতে পারে।
4. মুখোশ আরসিএনএন
মাস্ক আরসিএনএন শব্দার্থিক এবং উদাহরণ বিভাজন সম্পাদনের জন্য একটি জনপ্রিয় স্থাপত্য। মডেলটি সমান্তরালভাবে চিত্রের বিভিন্ন বস্তুর সীমাবদ্ধ অবস্থানের অবস্থান এবং একটি মুখোশ যা ভবিষ্যদ্বাণীগতভাবে বস্তুকে ভাগ করে। মৌলিক আর্কিটেকচার বেশিরভাগ মানুষের পজিশনের জন্য সহজেই বর্ধিত করা যেতে পারে।
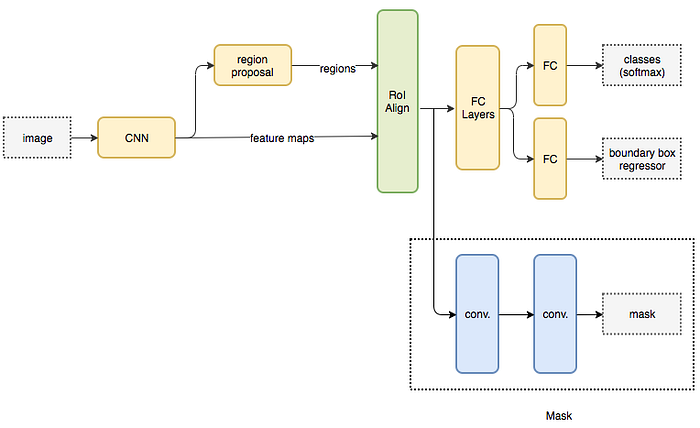
বেসিক আর্কিটেকচারের প্রথম এক্সট্রাক্টগুলি একটি সিএনএন ব্যবহার করে একটি চিত্র থেকে মানচিত্র বৈশিষ্ট্য করে। বস্তুর উপস্থিতির জন্য বাঁধাকপি বাক্স প্রার্থীদের পেতে এই বৈশিষ্ট্য মানচিত্রগুলি একটি অঞ্চল প্রস্তাব নেটওয়ার্ক (RPN) দ্বারা ব্যবহৃত হয়। সীমাবদ্ধ বাক্স প্রার্থী সিএনএন দ্বারা উদ্ভূত বৈশিষ্ট্য মানচিত্র থেকে একটি এলাকা (অঞ্চল) নির্বাচন করুন। যেহেতু বাঁধাকপি বাক্সগুলি বিভিন্ন মাপের হতে পারে, তাই RoIAlign নামক একটি স্তরটি এক্সট্র্যাক্ট বৈশিষ্ট্যটির আকার হ্রাস করার জন্য ব্যবহার করা হয় যেমন তারা একক আকারের। এখন, এই এক্সট্র্যাক্ট বৈশিষ্ট্যটি সিএনএনগুলির সমান্তরাল শাখায় সীমাবদ্ধ বাক্স এবং সেগমেন্টেশন মাস্কগুলির চূড়ান্ত ভবিষ্যদ্বাণী হিসাবে প্রেরণ করা হয়েছে।
আমাদের বিভাজন সঞ্চালন যে শাখায় ফোকাস যাক। ধরুন আমাদের ইমেজ একটি বস্তু কে ক্লাসের মধ্যে এক হতে পারে। বিভাজন শাখা
সমান্তরালভাবে, আপত্তি সনাক্তকরণ অ্যালগরিদম ব্যক্তিদের অবস্থান সনাক্ত করতে প্রশিক্ষিত করা যেতে পারে। ব্যক্তির অবস্থানের পাশাপাশি কীপয়েন্টগুলির সেটের তথ্য সংযোজন করে, আমরা চিত্রের প্রতিটি ব্যক্তির জন্য মানব দেহের কঙ্কালটি অর্জন করি।
এই পদ্ধতি প্রায় শীর্ষ-ডাউন পদ্ধতির অনুরূপ, কিন্তু ব্যক্তি সনাক্তকরণ পর্যায় অংশ সনাক্তকরণ পর্যায়ে সমান্তরাল সঞ্চালিত হয়। অন্য কথায়, কীপয়েন্ট সনাক্তকরণ স্তর এবং ব্যক্তি সনাক্তকরণ পর্যায় একে অপরের থেকে স্বাধীন।
5. অন্যান্য পদ্ধতি
মাল্টি-পার্সম্যান হিউম্যান পোজ অনুমান সমস্যাটি মোকাবেলা করার পদ্ধতিগুলির সাথে এক বিশাল ক্ষেত্র। সংক্ষিপ্ত জন্য, শুধুমাত্র একটি নির্বাচন কয়েক পন্থা এখানে ব্যাখ্যা করা হয়। পন্থাগুলির আরো একটি সম্পূর্ণ তালিকার জন্য, আপনি নিচের লিঙ্কটি দেখতে পারেন:
আমাদের বিভাজন সঞ্চালন যে শাখায় ফোকাস যাক। ধরুন আমাদের ইমেজ একটি বস্তু কে ক্লাসের মধ্যে এক হতে পারে। বিভাজন শাখা
K আকার বাইনারি মাস্ক আউটপুট m x m, যেখানে প্রতিটি বাইনারি মাস্ক একা সেই ক্লাসের সমস্ত বস্তুর প্রতিনিধিত্ব করে। আমরা প্রত্যেকটি কীপয়েন্টকে একটি স্বতন্ত্র শ্রেণী হিসাবে মডেল করে এবং সেগমেন্টেশনের সমস্যা মত আচরণ করে চিত্রটির প্রতিটি ব্যক্তির সাথে সম্পর্কিত কী পয়েন্টগুলি বের করতে পারি। সমান্তরালভাবে, আপত্তি সনাক্তকরণ অ্যালগরিদম ব্যক্তিদের অবস্থান সনাক্ত করতে প্রশিক্ষিত করা যেতে পারে। ব্যক্তির অবস্থানের পাশাপাশি কীপয়েন্টগুলির সেটের তথ্য সংযোজন করে, আমরা চিত্রের প্রতিটি ব্যক্তির জন্য মানব দেহের কঙ্কালটি অর্জন করি।
এই পদ্ধতি প্রায় শীর্ষ-ডাউন পদ্ধতির অনুরূপ, কিন্তু ব্যক্তি সনাক্তকরণ পর্যায় অংশ সনাক্তকরণ পর্যায়ে সমান্তরাল সঞ্চালিত হয়। অন্য কথায়, কীপয়েন্ট সনাক্তকরণ স্তর এবং ব্যক্তি সনাক্তকরণ পর্যায় একে অপরের থেকে স্বাধীন।
5. অন্যান্য পদ্ধতি
মাল্টি-পার্সম্যান হিউম্যান পোজ অনুমান সমস্যাটি মোকাবেলা করার পদ্ধতিগুলির সাথে এক বিশাল ক্ষেত্র। সংক্ষিপ্ত জন্য, শুধুমাত্র একটি নির্বাচন কয়েক পন্থা এখানে ব্যাখ্যা করা হয়। পন্থাগুলির আরো একটি সম্পূর্ণ তালিকার জন্য, আপনি নিচের লিঙ্কটি দেখতে পারেন:
অ্যাপ্লিকেশন
আনুমানিক আয়তন অসংখ্য ক্ষেত্রগুলিতে অ্যাপ্লিকেশন আছে, যার মধ্যে কয়েকটি নীচে তালিকাভুক্ত।
1. কার্যকলাপের স্বীকৃতি,
সময়ের সাথে সাথে একজন ব্যক্তির অবস্থানের পার্থক্যগুলি ট্র্যাকিং কার্যকলাপ, অঙ্গভঙ্গি এবং গতি সনাক্তকরণের জন্যও ব্যবহার করা যেতে পারে। এর জন্য অনেকগুলি ব্যবহারের ক্ষেত্রে রয়েছে, সহ:
- একটি ব্যক্তি পতিত হয়েছে বা অসুস্থ কিনা তা সনাক্ত করার জন্য অ্যাপ্লিকেশন।
- স্বতন্ত্রভাবে সঠিক workout শাসন, খেলাধুলা কৌশল এবং নাচ কার্যক্রম শেখান করতে পারেন যে অ্যাপ্লিকেশন।
- সম্পূর্ণ শরীরের সাইন ভাষা বুঝতে পারেন যে অ্যাপ্লিকেশন। (প্রাক্তন: বিমানবন্দর রানওয়ে সংকেত, ট্রাফিক পুলিশ সদস্য, ইত্যাদি)।
- নিরাপত্তা এবং নজরদারি উন্নত করতে পারেন যে অ্যাপ্লিকেশন।
2. মোশন ক্যাপচার এবং বর্ধিত বাস্তবতা
মানব সীমা অনুমানের একটি আকর্ষণীয় আবেদন CGI অ্যাপ্লিকেশনগুলির জন্য। গ্রাফিক্স, শৈলী, অভিনব বর্ধিতকরণ, যন্ত্রপাতি এবং শিল্পকর্মটি যদি মানুষের মানসিকতা অনুমান করা যায় তবে সেটির উপর অত্যধিক প্রভাব বিস্তার করা যেতে পারে। এই মানব দেহের বৈচিত্রের উপর নজর রেখে, উপস্থাপিত গ্রাফিক্স ব্যক্তিরা যেভাবে স্থানান্তরিত হয় সেটি "স্বাভাবিকভাবেই ফিট" করতে পারে।
মানব সীমা অনুমানের একটি আকর্ষণীয় আবেদন CGI অ্যাপ্লিকেশনগুলির জন্য। গ্রাফিক্স, শৈলী, অভিনব বর্ধিতকরণ, যন্ত্রপাতি এবং শিল্পকর্মটি যদি মানুষের মানসিকতা অনুমান করা যায় তবে সেটির উপর অত্যধিক প্রভাব বিস্তার করা যেতে পারে। এই মানব দেহের বৈচিত্রের উপর নজর রেখে, উপস্থাপিত গ্রাফিক্স ব্যক্তিরা যেভাবে স্থানান্তরিত হয় সেটি "স্বাভাবিকভাবেই ফিট" করতে পারে।

কি সম্ভব একটি ভাল চাক্ষুষ উদাহরণ অ্যানিমোজি মাধ্যমে দেখা যাবে । যদিও উপরে শুধুমাত্র মুখটির গঠনকে ট্র্যাক করে তবে ধারণাটি একজন ব্যক্তির মূল পয়েন্টগুলির জন্য বহিষ্কৃত করা যেতে পারে। একই ধারণাগুলি আংশিক বাস্তবতা (এআর) উপাদানগুলিকে রেন্ডার করতে পারে যা একটি ব্যক্তির আন্দোলনের অনুকরণ করতে পারে।
3. প্রশিক্ষণ রোবটগুলি
ট্রাজেক্টরির অনুসরণ করতে স্বয়ংক্রিয়ভাবে রোবট প্রোগ্রামিংয়ের পরিবর্তে, একটি কর্ম সঞ্চালনকারী মানব দেহের কঙ্কালের ট্রাজেক্টোরিজিকে অনুসরণ করতে রোবট তৈরি করা যেতে পারে। একটি মানব প্রশিক্ষক কার্যকরভাবে একই প্রদর্শন করে রোবট নির্দিষ্ট কর্ম শেখান করতে পারেন। তারপর রোবট একই কর্ম সঞ্চালনের জন্য তার articulators সরানো কিভাবে গণনা করতে পারেন।
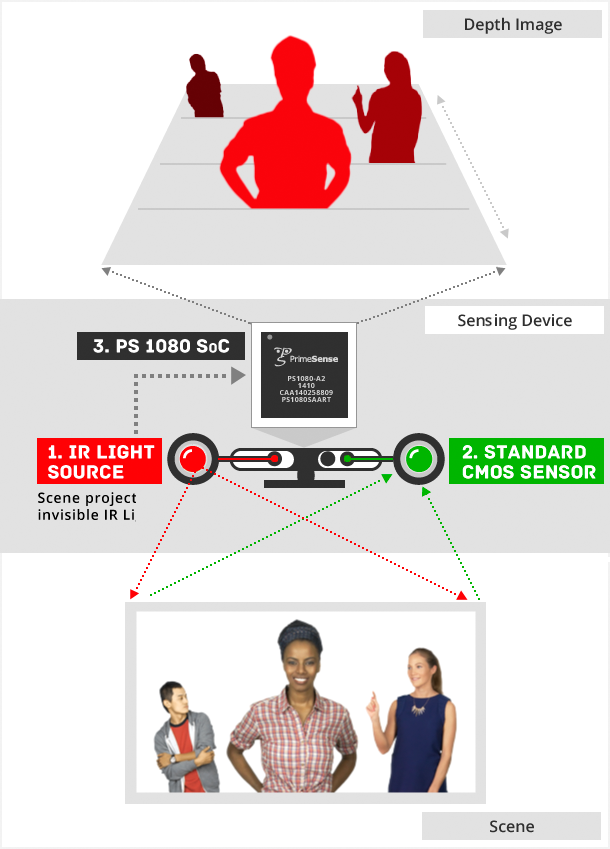
4. কনসোল জন্য গতি ট্র্যাকিং
ইন্টারফেক্টিভ গেমিংয়ের জন্য মানুষের বিষয়গুলির গতির ট্র্যাকিংয়ের জন্য পোজ অনুমানের একটি আকর্ষণীয় আবেদন। জনপ্রিয়ভাবে, Kinect মানব প্লেয়ারের গতি ট্র্যাক করতে এবং ভার্চুয়াল অক্ষরের ক্রিয়াগুলি রেন্ডার করার জন্য এটি ব্যবহার করার জন্য 3D পোজ অনুমান ব্যবহার করে (আইআর সেন্সর ডেটা ব্যবহার করে)।
3. প্রশিক্ষণ রোবটগুলি
ট্রাজেক্টরির অনুসরণ করতে স্বয়ংক্রিয়ভাবে রোবট প্রোগ্রামিংয়ের পরিবর্তে, একটি কর্ম সঞ্চালনকারী মানব দেহের কঙ্কালের ট্রাজেক্টোরিজিকে অনুসরণ করতে রোবট তৈরি করা যেতে পারে। একটি মানব প্রশিক্ষক কার্যকরভাবে একই প্রদর্শন করে রোবট নির্দিষ্ট কর্ম শেখান করতে পারেন। তারপর রোবট একই কর্ম সঞ্চালনের জন্য তার articulators সরানো কিভাবে গণনা করতে পারেন।
4. কনসোল জন্য গতি ট্র্যাকিং
ইন্টারফেক্টিভ গেমিংয়ের জন্য মানুষের বিষয়গুলির গতির ট্র্যাকিংয়ের জন্য পোজ অনুমানের একটি আকর্ষণীয় আবেদন। জনপ্রিয়ভাবে, Kinect মানব প্লেয়ারের গতি ট্র্যাক করতে এবং ভার্চুয়াল অক্ষরের ক্রিয়াগুলি রেন্ডার করার জন্য এটি ব্যবহার করার জন্য 3D পোজ অনুমান ব্যবহার করে (আইআর সেন্সর ডেটা ব্যবহার করে)।
উপসংহার
মানব পজিশনের প্রাক্কলনের ক্ষেত্রে মহান অগ্রগতি হয়েছে, যা আমাদের সাথে সম্ভাব্য অসাধারণ অ্যাপ্লিকেশনগুলিকে আরও ভালোভাবে পরিবেশন করতে সক্ষম করে। তাছাড়া, পস ট্র্যাকিং সম্পর্কিত সংশ্লিষ্ট ক্ষেত্রগুলিতে গবেষণাটি বেশ কয়েকটি ক্ষেত্রে তার উত্পাদনশীল ব্যবহার ব্যাপকভাবে বাড়িয়ে তুলতে পারে। এই ব্লগে তালিকাভুক্ত ধারণাগুলি সম্পূর্ণ নয় তবে এই অ্যালগরিদমগুলির কিছু জনপ্রিয় রূপ এবং তাদের বাস্তব-জীবন অ্যাপ্লিকেশনগুলি পরিচয় করিয়ে দেওয়ার চেষ্টা করে।
ভারথ রাজ সিমেন্স পিএলএম সফটওয়্যারের সহযোগী প্রকৌশলী। তিনি মেশিন লার্নিং এবং কম্পিউটার দৃষ্টি ধারণা সঙ্গে পরীক্ষা করতে ভালবাসেন। আপনি এখানে তার প্রকল্প চেক আউট করতে পারেন ।
Yoni Osin BeyondMinds এ R & D- ভিপি হয়
মূল । অনুমতি সঙ্গে reposted।
সম্পর্কিত:
0 comments:
Post a Comment