২. গবেষণার বিষয়বস্তু এবং লক্ষ্যগুলি (নির্দিষ্ট গবেষণা সামগ্রী, গবেষণার উদ্দেশ্য এবং কী কী সমাধান করা হবে তা নির্দেশ করুন))
গবেষণা উদ্দেশ্য
এই বিষয়টিতে দূরবর্তী সেন্সিং চিত্রের শ্রেণিবদ্ধকরণ এবং লক্ষ্য সনাক্তকরণের জন্য একাধিক বৈশিষ্ট্য-ভিত্তিক গভীর শেখার পদ্ধতির প্রস্তাব দেওয়া হয়েছে। শ্রেণিবিন্যাসে গবেষণা লক্ষ্যটি হ'ল জনপ্রিয় জনপ্রিয় শ্রেণিবদ্ধকরণ পদ্ধতির তুলনা করা same একই প্রশিক্ষণের নমুনাগুলির অধীনে শ্রেণিবদ্ধকরণের যথার্থতা উন্নত করা এবং প্রশিক্ষণ ও ভবিষ্যদ্বাণী সময় হ্রাস করা এবং দীর্ঘ প্রশিক্ষণের সময় প্রস্তুত করা এবং সঠিকতা বর্তমান হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের শ্রেণিবিন্যাসে আদর্শ নয়। এবং অন্যান্য বিষয়। লক্ষ্য সনাক্তকরণের উপর গবেষণার লক্ষ্য হ'ল বর্তমান জনপ্রিয় সনাক্তকরণ পদ্ধতির তুলনায় প্রশিক্ষণের নমুনার একই অনুপাত সহ ছোট লক্ষ্যমাত্রা এবং বৃহত লক্ষ্যগুলির গড় যথার্থতা (এপি) এবং সামগ্রিক গড় যথার্থতা (এমএপি) উন্নত করা। এটি বর্তমান অপটিকাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণের ত্রুটিগুলি যেমন ছোট টার্গেট সনাক্তকরণের ক্ষেত্রে কম যথাযথতা, পটভূমির প্রভাবের সংবেদনশীলতা এবং পর্যাপ্ত নমুনার অভাবের সমাধান করে এবং হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের শ্রেণিবিন্যাস এবং অপটিকাল রিমোট সেন্সিং চিত্র লক্ষ্য সনাক্তকরণের বিকাশকে উত্সাহ দেয়।
2. গবেষণা বিষয়বস্তু
এই বিষয়টি রিমোট সেন্সিং ইমেজ শ্রেণিবদ্ধকরণ এবং লক্ষ্য সনাক্তকরণের জন্য একাধিক বৈশিষ্ট্য-ভিত্তিক গভীর শেখার পদ্ধতি অধ্যয়ন করে। লক্ষ্যটি হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্র শ্রেণিবদ্ধকরণ এবং অপটিক্যাল রিমোট সেন্সিং চিত্র লক্ষ্য সনাক্তকরণের যথার্থতা উন্নত করা, এবং হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলি এবং অপটিক্যাল রিমোট সেন্সিং চিত্রগুলির স্থান অর্জন করা। কার্যকর বৈশিষ্ট্য নিষ্কাশন পদ্ধতিতে মূলত নিম্নলিখিত দুটি বিষয়বস্তু অন্তর্ভুক্ত।
২.১ বহু-বৈশিষ্ট্যযুক্ত ফিউশন এবং গভীর অরণ্যের ভিত্তিতে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের শ্রেণিবদ্ধকরণ পদ্ধতি।
বর্তমানে গভীর অরণ্যের উপর ভিত্তি করে হাইপারস্পেকট্রাল রিমোট সেন্সিং ইমেজগুলির শ্রেণিবদ্ধকরণ পদ্ধতিগুলি মূলত দুটি বিভাগে বিভক্ত।একটি হ'ল একক শ্রেণিবদ্ধের জন্য বর্ণালী তথ্য ব্যবহার করা ,এই পদ্ধতিগুলি প্রতিটি পিক্সেলের এক-মাত্রিক বর্ণালী ভেক্টরকে বৈশিষ্ট্য ভেক্টর হিসাবে ব্যবহার করে এবং শ্রেণিবিন্যাসের জন্য গভীর বনকে সরাসরি ইনপুট দেয়। শ্রেণিবদ্ধকরণ স্থানিক তথ্য ব্যবহার করে না এবং শ্রেণিবিন্যাসের প্রভাব সীমাবদ্ধ। একটি হ'ল মূল উপাদান বিশ্লেষণের মাধ্যমে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের মাত্রিকতা হ্রাস করা এবং তারপরে প্রতিটি পিক্সেলের নমুনা থেকে ব্লক নিয়ে আশেপাশের ছোট-স্কেল পিক্সেলের তথ্য সহ একটি ত্রিমাত্রিক নমুনা অর্জন করা এর কয়েকটি পদ্ধতি স্থানীয় বাইনারি মোড ব্যবহার করে। (স্থানীয় বাইনারি প্যাটার্ন) বা গ্যাবার ফিল্টার এবং অন্যান্য পদ্ধতির উচ্চ স্তরের স্থানিক শব্দার্থক তথ্য পেতে এবং অবশেষে শ্রেণিবিন্যাসের জন্য গভীর বন ব্যবহার করে এই পদ্ধতিগুলি স্থানিক তথ্য বের করে শ্রেণিবিন্যাস অর্জন করে। তবে, এই পদ্ধতিগুলি কেবলমাত্র একটি সাধারণ ব্লক নিষ্কাশন পদ্ধতি বা একটি স্থানিক বৈশিষ্ট্য নিষ্কাশন পদ্ধতি ব্যবহার করে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির স্থানিক তথ্যের অপর্যাপ্ত ব্যবহার করে। তদুপরি, অ্যালগরিদম মডেল একই সাথে বিভিন্ন বৈশিষ্ট্য ব্যবহার করার ক্ষমতা রাখে না, যা সীমাবদ্ধ করে.
এই বিষয়টি বহু-বৈশিষ্ট্যযুক্ত ফিউশনটির উপর ভিত্তি করে গভীর বন হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির শ্রেণিবদ্ধকরণের উপর ভিত্তি করে প্রথমত, স্থানিক তথ্য সম্বলিত নমুনাগুলি ব্যান্ডের মাত্রা হ্রাস এবং স্লাইডিং উইন্ডো আনার মাধ্যমে প্রাপ্ত হয়। বৈশিষ্ট্য নিষ্কাশন এবং শ্রেণিবিন্যাসের জন্য পরবর্তী গভীর নেটওয়ার্কগুলিকে সরাসরি ইনপুট করার ক্ষেত্রে এই নমুনা ব্লকগুলিতে থাকা স্থানিক তথ্য সম্পূর্ণরূপে ব্যবহার করা হয় না। প্রসারিত তথ্যের ব্যবহার উন্নত করতে প্রসারিত তথ্য নিষ্ক্রিয় করতে, তথ্যকে উল্লেখযোগ্যভাবে বর্ধন করতে এবং প্রান্তিক তথ্যের ব্যবহার করতে এক্সটেন্ডেড মোর্ফোলজিকাল কনট্যুরস (ইএমপি), স্যালেন্সি সনাক্তকরণ এবং কনট্যুর সনাক্তকরণ ব্যবহার করা যেতে পারে। গভীর বন বৈশিষ্ট্য দ্বারা স্তর সংক্রমণ সম্পাদন করতে এলোমেলো বনগুলিকে সংহত করে একটি ক্যাসকেড আর্কিটেকচার গঠন করে। গভীর অরণ্যের সারমর্ম হ'ল se অতএব, গভীর বন এর বেসিক ইউনিট সিদ্ধান্ত গাছের মতো একই সংহতকরণ বৈশিষ্ট্য রয়েছে এবং একই সাথে একাধিক গভীর বন একটি সিপিইউতে প্রশিক্ষিত হতে পারে। ডিজিফোরেস্ট কাসকেড অরণ্যের উপর ভিত্তি করে গভীর বনাঞ্চলের বহু-গ্রানুলারিটি স্ক্যানিংকে গভীর বুনিয়াদি স্ক্যানিং উন্নত করে বৈশিষ্ট্য নিষ্কাশন ক্ষমতাটি উন্নত করে raction ক্যাসকেড অরণ্যের উপর ভিত্তি করে একাধিক গ্রানুলারিটি স্ক্যান স্ট্রাকচার বিভিন্ন বৈশিষ্ট্য আহরণের জন্য ব্যবহৃত হয় Finally অবশেষে, গভীর বন আউটপুট শ্রেণীর সম্ভাব্যতা ভেক্টরের বৈশিষ্ট্যগুলি একাধিক গভীর বৈশিষ্ট্যগুলি ফিউজ করতে ব্যবহৃত হয়, যা কার্যকরভাবে একাধিক বৈশিষ্ট্যের ব্যবহার দক্ষতা এবং শ্রেণিবিন্যাসের প্রভাব উন্নত করতে পারে।
২.২ মাল্টি-ফিচার-ভিত্তিক গভীর শেখার অপটিকাল রিমোট সেন্সিং চিত্র লক্ষ্য সনাক্তকরণ পদ্ধতি
YOLOv3 অ্যালগরিদমটি এক-পর্যায় অ্যালগরিদমের প্রতিনিধি এবং এটি YOLO সিরিজের অ্যালগরিদমের তৃতীয় উন্নত সংস্করণ। নেটওয়ার্কগুলির পূর্ববর্তী দুটি প্রজন্মের সাথে তুলনা করে, YOLOv3 বহু আকারের বৈশিষ্ট্য মানচিত্র যুক্ত করেছে এবং বিভিন্ন আকারের টার্গেটগুলির সনাক্তকরণের প্রভাবগুলি বিবেচনা করে প্রতিটি স্কেলগুলিতে শ্রেণিবদ্ধকারী এবং লোকেটারগুলির সনাক্তকরণ কার্য সম্পাদন করেছে। অতএব, বর্তমান দুই-স্তরের নেটওয়ার্ক এবং ওয়ান-স্টেজ নেটওয়ার্কে এটি সনাক্তকরণের নির্ভুলতা এবং সনাক্তকরণের গতি উভয় বিবেচনা করেই একটি আদর্শ মডেল তবে YOLOv3 মডেলটিতে এখনও অনেকগুলি ত্রুটি রয়েছে। বহু-স্কেল বৈশিষ্ট্যগুলিতে, কনভ্যুশনাল স্তরগুলি এবং পুলিং স্তরগুলির ব্যবহারের কারণে ক্ষুদ্রতর মানচিত্রের ছোট লক্ষ্যগুলি হারিয়ে যায়, সুতরাং কেবলমাত্র বৃহত লক্ষ্যগুলি এবং জটিল পটভূমি তথ্য অবশেষ থাকে, যা সহজেই বড় লক্ষ্যগুলির শ্রেণিবিন্যাসের যথার্থতাকে প্রভাবিত করে। ছোট লক্ষ্যবস্তুগুলির তথ্য বৃহত আকারের চিত্রগুলিতে বজায় থাকে তবে ছোট লক্ষ্যগুলির তীক্ষ্ণতা হ্রাস হয় এবং কনভ্যুশন স্তর এবং পুলিং স্তরটি অতিক্রম করার পরে সীমারেখাটি মূল চিত্রের তুলনায় আরও ঝাপসা হয়। এই কারণগুলি সনাক্তকরণের প্রভাবের আরও উন্নতি সীমাবদ্ধ করে।
এই বিষয়টিতে অধ্যয়ন করা মাল্টি-ফিচার-ভিত্তিক গভীর শেখার অপটিক্যাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণ পদ্ধতিটি YOLOv3 মডেলের বৃহত-স্কেল বৈশিষ্ট্যের মানচিত্রে কনট্যুর সনাক্তকরণ যুক্ত করে ছোট লক্ষ্যগুলির তীক্ষ্ণতা উন্নত করে। ক্ষুদ্র-স্কেল বৈশিষ্ট্য মানচিত্রগুলিতে বিশিষ্টতা সনাক্তকরণ যুক্ত করে, বৃহত লক্ষ্যগুলির বিশিষ্টতা উন্নত হয় এবং লক্ষ্য স্বীকৃতিতে পটভূমি শব্দের প্রভাব হ্রাস হয়। এর ফলে সামগ্রিক লক্ষ্য সনাক্তকরণের প্রভাব কার্যকরভাবে কার্যকর করা।
৩. মূল বিষয়গুলি সমাধান করা উচিত
1) গভীর অরণ্যের জন্য বর্তমান হাইপারস্পেকট্রাল রিমোট সেন্সিং ইমেজ শ্রেণিবদ্ধকরণ পদ্ধতিগুলি কেবল অন্তর্নিহিত স্থানিক তথ্য ব্যবহার করে এবং স্থানিক তথ্যের ব্যবহার বেশি নয়, এবং মডেলটিতে একাধিক বৈশিষ্ট্য একত্রিত করার ক্ষমতা নেই, হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির জন্য গভীর বনের ব্যবহার সীমাবদ্ধ করে শ্রেণিবিন্যাসের প্রভাব Therefore সুতরাং, কীভাবে বিভিন্ন স্থানিক বৈশিষ্ট্যগুলি নির্বাচন করবেন এবং গভীর বনাঞ্চলকে কীভাবে উন্নত করা যায় যাতে এটি বিভিন্ন বৈশিষ্ট্যগুলি একত্রিত করতে পারে, যাতে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের স্থানিক তথ্যকে পুরোপুরি ব্যবহার করতে এবং শ্রেণিবিন্যাসের প্রভাব উন্নত করা সমাধানের মূল চাবিকাঠি is অন্যতম সমস্যা।
2) YOLVv3 মডেল বা অন্যান্য গভীর শেখার লক্ষ্য সনাক্তকরণ মডেলগুলি যেগুলি বহু-স্কেল বৈশিষ্ট্যগুলিও ব্যবহার করে তাদের মধ্যে ছোট ছোট লক্ষ্যমাত্রার অপর্যাপ্ত সনাক্তকরণের মতো সমস্যা রয়েছে এবং সনাক্তকরণের প্রভাব সহজেই জটিল ব্যাকগ্রাউন্ড দ্বারা প্রভাবিত হয়। বর্তমানে, অনেক উন্নতি পদ্ধতি কেবল একটির সমস্যা সমাধানের দিকে মনোনিবেশ করে এবং সনাক্তকরণের প্রভাব সীমিত। একই সময়ে নেটওয়ার্কে একাধিক বৈশিষ্ট্য কীভাবে ব্যবহার করতে হবে এবং একই সাথে অপটিক্যাল রিমোট সেন্সিং চিত্র লক্ষ্য সনাক্তকরণের সম্মুখীন হওয়া একাধিক সমস্যার সমাধান করা এই বিষয়টির সমাধান করার আরও একটি মূল সমস্যা।
৩. গবেষণা পরিকল্পনা এবং সম্ভাব্যতা বিশ্লেষণ (সহ: গবেষণা পদ্ধতি, প্রযুক্তিগত রুট, তাত্ত্বিক বিশ্লেষণ, গণনা, পরীক্ষামূলক পদ্ধতি এবং পদক্ষেপ এবং তাদের সম্ভাব্যতা ইত্যাদি)
এই বিষয়টি দূরবর্তী সেন্সিং চিত্রের শ্রেণিবদ্ধকরণ এবং লক্ষ্য সনাক্তকরণে মাল্টি-ফিচার-ভিত্তিক গভীর শেখার পদ্ধতির প্রয়োগের অধ্যয়ন করে First প্রথমত, গভীর মাল্টি-গ্র্যানুলারিটি স্ক্যানিং অরণ্যের উপর ভিত্তি করে একটি বহু-শাখা কাঠামো হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির গভীরতা বিশ্লেষণ করতে ব্যবহৃত হয়। বৈশিষ্ট্য নিষ্কাশন এবং ফিউশন বৈশিষ্ট্যযুক্ত এবং তারপরে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির শ্রেণিবিন্যাস অর্জন করতে একটি একক স্তরের ক্যাসকেড বন ব্যবহার করুন। অবশেষে, রিমোট সেন্সিং ইমেজ প্রসেসিংয়ে মাল্টি-ফিচার প্রয়োগের পূর্ববর্তী গবেষণার পরে, জটিল ব্যাকগ্রাউন্ড এবং ছোট লক্ষ্যবস্তুগুলিতে অপটিক্যাল রিমোট সেন্সিং চিত্রগুলির লক্ষ্য সনাক্তকরণের প্রভাব উন্নত করার জন্য YOLOv3 অ্যালগরিদম কাঠামোতে স্যালিয়েন্স সনাক্তকরণ এবং কনট্যুর সনাক্তকরণ ব্যবহার করা হয়।
গবেষণা পদ্ধতি এবং প্রযুক্তিগত রুট
১.১ বহু-বৈশিষ্ট্যযুক্ত ফিউশন এবং গভীর অরণ্যের ভিত্তিতে হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের শ্রেণিবদ্ধকরণ পদ্ধতি
এই গবেষণা প্রকল্পে, একাধিক স্থানিক বৈশিষ্ট্য নিষ্কাশন পদ্ধতি এবং গভীর বন কাঠামো উন্নত করে বহু-বৈশিষ্ট্য ফিউশন উপর ভিত্তি করে একটি গভীর বন হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্র শ্রেণিবদ্ধকরণ পদ্ধতি প্রতিষ্ঠার প্রস্তাব করা হয়েছে।
প্রথমত, হাইপারস্পেকট্রাল কাঁচা ডেটার মাত্রিকতা হ্রাস করতে প্রধান উপাদানগুলির বিশ্লেষণ পদ্ধতি ব্যবহার করা হয় Because কারণ হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রের ডেটা পরিমাণ এবং ব্যান্ডের সংখ্যা বড়, তাই ডেটা প্রক্রিয়াকরণের আগে মাত্রিকতা হ্রাস অপারেশন করা প্রয়োজন। অধ্যক্ষ উপাদান বিশ্লেষণ একটি পরিসংখ্যান পদ্ধতি যা ভেরিয়েবলের একটি সেটকে রৈখিকভাবে অস্বচ্ছল ভেরিয়েবলের সংকলনে রূপান্তর করতে orthogonal রূপান্তর ব্যবহার করে formation ভেরিয়েবলের রূপান্তরিত সেটটিকে প্রধান উপাদান বলা হয় প্রথম এন স্তরগুলির প্রধান উপাদানগুলি মাত্রিকতা হ্রাসের পরে হাইপারস্পেকট্রাল নমুনা ডেটা হিসাবে বের করা হয়। মাত্রিকতা হ্রাসের পরে হাইপারস্পেকট্রাল নমুনা ডেটার স্থানিক বৈশিষ্ট্যগুলির উপর শব্দ থাকতে পারে, তাই মোর্ফোলজিকাল কনট্যুর প্রসারিত হাইপারস্পেকট্রাল চিত্রগুলিতে শব্দ কমিয়ে আনার জন্য একটি সাধারণ অ্যালগরিদম হিসাবে ব্যবহৃত হয়। এরপরে উচ্চতা স্পেসের প্রতিটি অঞ্চলের স্থানিক বৈশিষ্ট্যগুলিকে জোর দিয়ে শব্দের হ্রাসের পরে বৈশিষ্ট্য মানচিত্রের বৈশিষ্ট্যগুলি বাড়ানোর জন্য স্যালেন্সি সনাক্তকরণটি ব্যবহৃত হয়। তবে, বৈশিষ্ট্যগুলির প্রান্ত থেকে তথ্য বের করার জন্য স্যালিয়েন্সি সনাক্তকরণ যথেষ্ট নয়, সুতরাং শব্দ কমার পরে হাইপারস্পেক্ট্রাল ইমেজের কনট্যুর তথ্য বের করার জন্য কনট্যুর সনাক্তকরণকে আরও একটি সহজ পদ্ধতি হিসাবে ব্যবহৃত হয়। শেষ পর্যন্ত, তিনটি পৃথক পৃথক বৈশিষ্ট্য মাল্টি-বৈশিষ্ট্য গভীরতা নিষ্কাশন এবং ফিউশন জন্য গভীর মাল্টি-গ্রানুলারিটি স্ক্যান ক্যাসকেড বন দ্বারা গঠিত গভীরতা মডেলটিতে প্রেরণ করা হয়েছিল। নির্দিষ্ট ফ্লোচার্ট চিত্র 1 এ দেখানো হয়েছে।

Multi-feature extraction and fusion algorithm flowchart based on deep multi-granularity scanning cascade forest
এরপরে, গভীর মাল্টি-গ্রানুলারিটি স্ক্যানিং হল একটি আলগোরিদিম যা DgcFores মূল গভীর বনাঞ্চলে উন্নত করে It মূল বহু-গ্রানুলারিটি স্ক্যানিংয়ের পরে দুটি বহু-স্তরযুক্ত কাঠামোযুক্ত একটি কাঁচের বনগুলিতে দুটি এলোমেলো বন কাঠামো উন্নত করবে, আরও গভীর বৈশিষ্ট্য সহ মডেলটিকে তৈরি করবে নিষ্কাশন ক্ষমতা। মাল্টি-গ্রানুলারিটি স্ক্যানিং মূল তথ্যগুলিতে স্লাইডিং স্যাম্পলিং সম্পাদন করতে একাধিক স্লাইডিং উইন্ডো ব্যবহার করে এবং তারপরে পরবর্তী ক্যাসকেড বন প্রশিক্ষণের জন্য একাধিক নমুনা নমুনা হিসাবে ব্যবহার করে। প্রতিটি স্তরের ক্যাসকেড অরণ্য প্রতিটি বিভাগের অন্তর্গত প্রতিটি নমুনার সম্ভাব্যতা ভেক্টরকে আউটপুট দিতে পারে এবং এটিকে বনের পরবর্তী স্তরের ইনপুট হিসাবে ব্যবহার করতে পারে The ক্যাসকেড অরণ্য ক্রস-বৈধকরণের মাধ্যমে ক্যাসকেড স্তরগুলির সংখ্যা নির্ধারণ করে। বনের শেষ স্তর দ্বারা বর্গের মতো সম্ভাবনা ভেক্টর আউটপুট গভীর মাল্টি-গ্রানুলারিটি স্ক্যানের আউটপুট ফলাফল হিসাবে ব্যবহৃত হয়। গভীর বন কাঠামোর সমান্তরাল কম্পিউটিংয়ের সুবিধা গ্রহণ করে, ইএমপি বৈশিষ্ট্যগুলি, স্যালিয়েন্সি বৈশিষ্ট্যগুলি এবং কনট্যুর বৈশিষ্ট্যগুলি নিষ্কাশন করতে তিনটি গভীর মাল্টি-গ্রানুলারিটি স্ক্যানিং শাখা ব্যবহার করার প্রস্তাব দেওয়া হচ্ছে। তারপরে, তিনটি গভীরতা-স্বাধীনতার স্ক্যানগুলির আউটপুটগুলি বিটওয়াইজ সংযোজন ফিউশন সাপেক্ষে, সুতরাং প্রতিটি পিক্সেল প্রতিটি বিভাগের অন্তর্গত সম্ভাবনা এক সাথে তিনটি পৃথক বৈশিষ্ট্য দ্বারা নির্ধারিত হয়। শেষ অবধি, চূড়ান্ত শ্রেণীর সম্ভাবনা ভেক্টর চূড়ান্ত শ্রেণির পূর্বাভাসের জন্য একক-স্তরের ক্যাসকেড বনগুলিতে ইনপুট। সামগ্রিক শ্রেণিবদ্ধকরণ কাঠামো চিত্র 1 এ দেখানো হয়েছে এবং গভীর মাল্টি-গ্রানুলারিটি স্ক্যানিং ক্যাসকেড ফরেস্টের কাঠামো চিত্র 2 এ প্রদর্শিত হয়েছে।

Structural diagram of deep multi-granularity scanning cascade forest

গভীর মাল্টি-গ্রানুলারিটি স্ক্যানিং উচ্চ মাত্রিক ডেটা যেমন হাইপারস্পেকট্রাল রিমোট সেন্সিং চিত্রগুলির জন্য বিশেষভাবে ডিজাইন করা হয়েছে। এটির একটি শক্তিশালী প্রতিনিধিত্বমূলক শিক্ষার ক্ষমতা রয়েছে। স্থানিক তথ্য সহ ত্রিমাত্রিক নমুনা প্রথমে একাধিক সাব-পিক্সেল ব্লকগুলি পেতে একাধিক স্লাইডিং স্ক্যানিং উইন্ডোগুলির মাধ্যমে প্রাপ্ত হয়। এই সাব-পিক্সেল ব্লকগুলি পরে ক্যাসকেড বনাঞ্চলে ইনপুট ভেক্টর হিসাবে সমতল এবং সংযুক্ত করা হয়। ক্যাসকেডিং বন গভীর নিউরাল নেটওয়ার্কগুলির স্তর-দ্বারা-স্তর কাঠামোর অনুরূপ। ক্যাসকেড ফরেস্টের প্রতিটি স্তরে দুটি এলোমেলো বন এবং সম্পূর্ণরূপে এলোমেলো বন রয়েছে যা সিদ্ধান্ত গাছের সমন্বয়ে গঠিত। ক্যাসকেড বনাঞ্চলের প্রতিটি স্তর প্রতিটি পিক্সেল নমুনার প্রতিটি শ্রেণীর সাথে সম্পর্কিত সম্ভাব্যতা ভেক্টরগুলিকে আউটপুট দিতে পারে এবং এই ভেক্টরগুলি নিম্ন-স্তরের ইনপুট হিসাবে বহু-গ্রানুলারিটি স্ক্যান ভেক্টরগুলিতে সুপারপোজ করা হয়। ক্যাসকেড বনাঞ্চলের গভীরতা অবশেষে বনের প্রতিটি স্তরের বৈশিষ্ট্য নিষ্কাশন মানের ক্রস-বৈধকরণের মাধ্যমে নির্ধারিত হয় cas ক্যাসকেড বনের শেষ স্তর দ্বারা বর্গ সম্ভাব্যতা ভেক্টর আউটপুট একটি অপ্রয়োজনীয় তথ্য অপসারণের জন্য একটি পুলিং স্তরের মধ্য দিয়ে যায়। অবশেষে, স্পার্স গভীরতার বৈশিষ্ট্যগুলি প্রাপ্ত হয়।
১.২ মাল্টি-ফিচার-ভিত্তিক গভীর শেখার অপটিকাল রিমোট সেন্সিং চিত্র লক্ষ্য সনাক্তকরণ পদ্ধতি
এই প্রকল্পটি বিদ্যমান গভীর শিখন মডেলগুলিতে একাধিক নিউরাল নেটওয়ার্ক কাঠামো ভিত্তিক স্থানিক বৈশিষ্ট্য নিষ্কাশন পদ্ধতি এম্বেড করে একটি বহু-বৈশিষ্ট্য ভিত্তিক গভীর লার্নিং অপটিক্যাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণ পদ্ধতিটি প্রতিষ্ঠা করতে চায়।
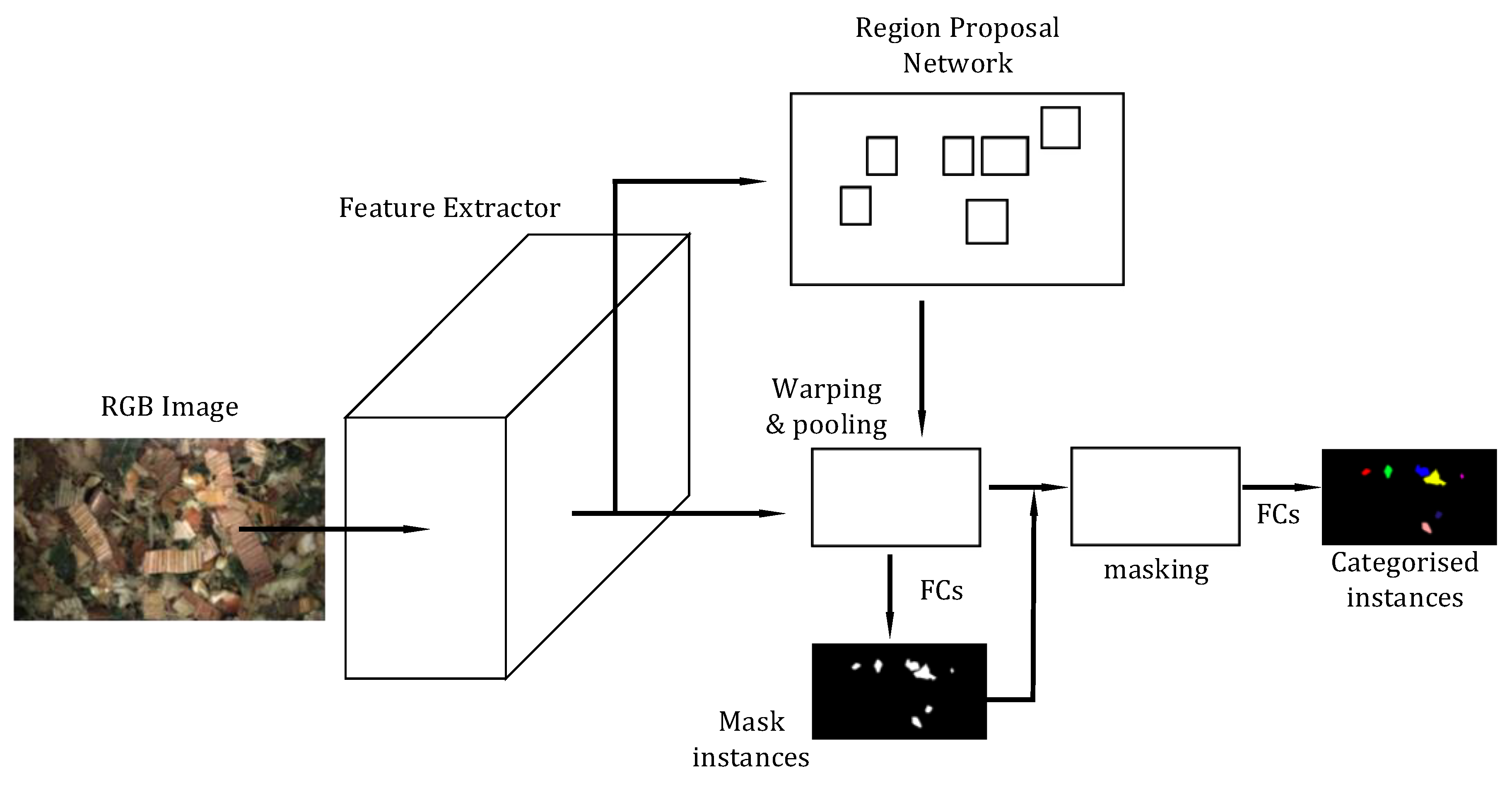
YOLOv3 বেসিক সনাক্তকরণ কাঠামো হিসাবে ব্যবহৃত হয়, এবং নিউরাল নেটওয়ার্কের উপর ভিত্তি করে কনট্যুর সনাক্তকরণের পদ্ধতিগুলি বহু-স্কেল বৈশিষ্ট্যযুক্ত বৃহত আকারের বৈশিষ্ট্য মানচিত্রে ব্যবহৃত হয় এবং নিউরাল নেটওয়ার্কগুলির উপর ভিত্তি করে তাত্পর্য সনাক্তকরণের পদ্ধতিগুলি ছোট-স্কেল বৈশিষ্ট্যের মানচিত্রে ব্যবহৃত হয়।কনট্যুর সনাক্তকরণ অ্যালগরিদম এবং স্যালিয়েন্সি অ্যালগরিদম উভয়ই নিউরাল নেটওয়ার্কগুলি দ্বারা প্রশিক্ষিত হতে পারে traditionalতিহ্যগত পদ্ধতির সাথে তুলনা করে, এটি লক্ষ্য সনাক্তকরণ কাঠামোর সাথে আরও ভাল ডকিং অর্জন করতে পারে। স্যালিয়েন্সি সনাক্তকরণ এবং কনট্যুর সনাক্তকরণ একই নেটওয়ার্ক কাঠামোর মাধ্যমে অর্জন করা যেতে পারে। ফ্লোচার্ট চিত্র 3 এ প্রদর্শিত হয়েছে। প্রথমত, দুটি ভিন্ন স্কেল বৈশিষ্ট্যের মানচিত্রগুলি মূল ডেটা হিসাবে ব্যবহৃত হয় এবং প্রশিক্ষণের ডেটা প্রাপ্ত করতে আসল তথ্য গ্রেস্কেলের মাধ্যমে প্রক্রিয়া করা হয়। তারপরে কনট্যুর সনাক্তকরণের সত্যিকারের ডেটা হিসাবে কনট্যুর বৈশিষ্ট্য মানচিত্রটি পেতে বড় আকারের কাঁচা ডেটা ব্যবহার করুন এবং প্রশিক্ষণ স্যালিয়েন্সি সনাক্তকরণ আসল তথ্য হিসাবে স্যালিয়েন্সি বৈশিষ্ট্য মানচিত্রটি পেতে ছোট-আকারের কাঁচা ডেটা ব্যবহার করুন। কনট্যুর বৈশিষ্ট্য মানচিত্র এবং স্যালিয়েন্সির বৈশিষ্ট্য মানচিত্রের আসল ডেটা মাতলাব দ্বারা প্রাপ্ত করা যেতে পারে। নিউরাল নেটওয়ার্ককে অবিচ্ছিন্নভাবে প্রশিক্ষণ দেওয়ার মাধ্যমে আউটপুট ফলাফলগুলি প্রকৃত তথ্যের নিকটে থাকে। অবশেষে, নিউরাল নেটওয়ার্ক-ভিত্তিক কনট্যুর সনাক্তকরণ এবং স্যালেন্সি সনাক্তকরণ কার্যকর করা যেতে পারে। তারপরে আমরা আরও ভাল লক্ষ্য সনাক্তকরণের ফলাফলগুলি অর্জনের জন্য YOLOv3 কাঠামোর মধ্যে স্যালেন্সি সনাক্তকরণ কাঠামো এবং কনট্যুর সনাক্তকরণ কাঠামো এম্বেড করি। সামগ্রিক অ্যালগরিদম ফ্লোচার্ট চিত্র 4 এ দেখানো হয়েছে।

Figure 3. Multi-feature based deep learning optical remote sensing image target detection algorithm flowchart

Figure 3. Multi-feature based deep learning optical remote sensing image target detection algorithm flowchart
2. সম্ভাব্যতা বিশ্লেষণ
উপরোক্ত গবেষণাটির কাজটি সুচারু করার জন্য, প্রচুর প্রাথমিক তদন্ত করা হয়েছে এবং কিছু ফলাফল অর্জনের জন্য সম্পর্কিত কিছু গবেষণা করা হয়েছে। বিশ্লেষণ এবং গবেষণার মাধ্যমে উপরের গবেষণা পদ্ধতি, প্রযুক্তিগত রুট এবং পরীক্ষামূলক প্রকল্পগুলি ব্যবহারিক।
২.১ গবেষণা পদ্ধতিগুলির সম্ভাব্যতা বিশ্লেষণ
মাল্টি-ফিচারের ব্যবহারে, আমি পূর্ববর্তী সময়ে প্রাসঙ্গিক অভিজ্ঞতা সংগ্রহ করেছি deep গভীর বনর শ্রেণিবদ্ধের সাথে মিলিতভাবে স্যালেন্সি সনাক্তকরণ এবং কনট্যুর সনাক্তকরণ বাস্তবায়ন করে আমি একটি কাগজ "হাইপারস্পেকট্রাল ইমেজ শ্রেণিবদ্ধকরণের জন্য মাল্টি-ফিচার ফিউশন ভিত্তিক ডিপ ফরেস্টের ভিত্তিতে" একটি কাগজ জমা দিয়েছি হাইপারস্পেকট্রাল চিত্রগুলির শ্রেণিবিন্যাসের যথার্থতা উন্নত। গভীর শিক্ষার উপর ভিত্তি করে অপটিকাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণের গবেষণায় বিদ্যমান সাহিত্যের টেবিলটি অবশ্যই এতে একটি ভূমিকা পালন করে, তবে এখনও অনেক কাজ অনুসন্ধান করতে হবে। আজকাল, গভীর শেখার এবং কম্পিউটার দর্শনের সংমিশ্রণটি আরও ঘনিষ্ঠ হয়। একটি মৌলিক কম্পিউটার ভিশন অ্যালগরিদম হিসাবে, কনট্যুর সনাক্তকরণের একটি নির্দিষ্ট সংমিশ্রণ স্থান রয়েছে। অভিযোজিত চিত্রের ক্রপিং ওভারল্যাপ অনুপাত এবং মাল্টি-স্কেল বৈশিষ্ট্য আকার নির্বাচনের ক্ষেত্রে, পূর্ববর্তী গবেষণাগুলি ক্রপিং এবং স্থির আকারের বহু-স্কেল বৈশিষ্ট্য মানচিত্রের জন্য একটি নির্দিষ্ট ওভারল্যাপ অনুপাত ব্যবহার করেছে Stat পরিসংখ্যান ভিত্তিক অভিযোজিত নির্বাচন কার্যকর করা সহজ এবং তুলনামূলকভাবে ভাল তাত্ত্বিক ভিত্তি। মডেল ট্রান্সফার লার্নিংয়ের ক্ষেত্রে, অপ্টিকাল রিমোট সেন্সিং ইমেজ টার্গেট ডিটেকশনটি মাইগ্রেশনের জন্য ইমজেনেট ডেটাসেট ব্যবহার করে অধ্যয়ন করা হয়েছে এবং নির্দিষ্ট ফলাফল অর্জন করেছে। অন্যান্য অপটিক্যাল রিমোট সেন্সিং ইমেজ ডেটা বা এসএআর ডেটা ব্যবহার করা যা লক্ষ্য এবং ডেটার বৈশিষ্ট্যের জায়গার সাথে আরও সাদৃশ্যপূর্ণ তাত্ত্বিক সমর্থন এবং গবেষণার পটভূমি রয়েছে। সুতরাং, এই বিষয়টির গবেষণামূলক সামগ্রীটি একটি দীর্ঘমেয়াদী তদন্ত এবং অনুসন্ধান থেকে প্রাপ্ত একটি সম্ভাব্য সমাধান।
২.২ প্রাথমিক কাজের ভিত্তি
তিনি সম্পর্কিত দিকগুলির একটি সাহিত্য পর্যালোচনা প্রকাশ করেছেন এবং পূর্ববর্তী গবেষণায় দুটি সফ্টওয়্যার কপিরাইটের জন্য আবেদন করেছেন:
[1] Liu Xiaobo., Liu Peng. Cai Zhihua., Qiao Yulin, Wang Ling, Wang Min Research progress on object detection of optical remote sensing images based on deep learning. Acta Automatica Sinica, 2019, DOI: 10.16383 / j.aas.c190455.
[2] Liu Xiaobo, Liu Peng, Qiao Yulin, Yin Xu. Hyperspectral remote sensing image contour detection system software v1.0. Registration number: 2019SR0707953. Registration date: July 09, 2019.
[3] Liu Xiaobo, Liu Peng, Qiao Yulin, Yin Xu. Data augmentation system software for target detection
তাদের মধ্যে, কাগজ [1] বিপুল সংখ্যক সাহিত্যের উল্লেখ করার পরে গভীর শিক্ষার উপর ভিত্তি করে অপটিকাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণ অ্যালগরিদমগুলির বর্তমান গবেষণা অবস্থার বিশ্লেষণ করে। এটি অপটিকাল রিমোট সেন্সিং ইমেজ টার্গেট সনাক্তকরণের 7 টি দিকগুলির মূল সমস্যাগুলি দ্বারা চালিত। প্রতিটি অ্যালগরিদমের সুবিধাগুলি এবং অসুবিধাগুলি এবং যা থেকে ভবিষ্যতের সম্ভাব্য গবেষণার দিকনির্দেশগুলি সংক্ষিপ্ত করা হয়। সফট ওয়ার্ক [২] হাইপারস্পেকট্রাল রিমোট সেন্সিং ইমেজগুলিতে থাকা সমৃদ্ধ স্থানিক তথ্য বিবেচনা করে, কনট্যুর সনাক্তকরণ অ্যালগরিদমগুলি দ্বারা মূল উপাদান বিশ্লেষণের পরে তিনটি চ্যানেলের হাইপারস্পেক্ট্রাল চিত্রগুলিতে কনট্যুর সনাক্তকরণ করা হয়েছিল এবং হাইপারস্পেকট্রাল চিত্রগুলির কনট্যুর তথ্য বের করা হয়েছিল। পরবর্তী হাইপারস্পেকট্রাল চিত্রের শ্রেণিবিন্যাসের ব্যবহারের সুবিধার্থ করুন। সফট ওয়ার্ক [3] অ্যাকাউন্টের ডেটা সম্প্রসারণের পদ্ধতিগুলির মধ্যে নেয় যেমন অনুভূমিক ফ্লিপ, আয়না ফ্লিপ এবং অনুবাদ যা প্রায়শই লক্ষ্য সনাক্তকরণের কাজে ব্যবহৃত হয়, এবং প্রবর্তক সফটওয়্যারের মাধ্যমে এই পদ্ধতিগুলিকে একীভূত করে তোলে যাতে তাদের সরাসরি লক্ষ্য সনাক্তকরণ কার্যে ডাকা যেতে পারে।
উপরের বিশ্লেষণের মাধ্যমে, এই বিষয়টির গবেষণার কিছু নির্দিষ্ট তাত্ত্বিক ফলাফল রয়েছে পূর্ববর্তী রচনায় প্রচুর পরিমাণে সাহিত্যের গবেষণার সাথে মিলিত, একাধিক বৈশিষ্ট্যের সাথে গভীর শিক্ষার উপর ভিত্তি করে অপটিকাল রিমোট সেন্সিং ইমেজ টার্গেট ডিটেকশন আলগোরিদিমগুলির উপর গবেষণা চালানোর জন্য এই বিষয়টির গবেষণাটি ব্যবহারিক।
বর্তমান সময়ে দূর অনুধাবন বা রিমোট সেন্সিং এর ব্যবহার ব্যাপক আকার ধারণ করেছে। বিজ্ঞান ও প্রকৌশলের বিভিন্ন শাখায় এর বহুল ব্যবহার লক্ষণীয় এবং দিন দিন এর ব্যবহার বেড়েই চলেছে। যেসব ক্ষেত্রে এই প্রযুক্তি ব্যবহার করা হয় তা নিম্নে উল্লেখ করা হলঃ
- দুর্যোগ পূর্বাভাস ও ব্যবস্থাপনা
- আবহাওয়া পর্যবেক্ষন ও পুর্বাভাস প্রদান
- আবহাওয়া ও সমুদ্র মডেলিং
- বিমান চালানো
- নৌ পরিবহন ও ন্যাভিগেশন
- টেলিকমিউনিকেশন
- স্থাপনা নির্মাণ
- পুরাকৌশল
- সামরিক বাহিনী
- পরিবহন জালি পরিকল্পনা ও ব্যবস্থাপনা
- নগর পরিকল্পনা
- কৃষি ব্যবস্থাপনা
- পরিবেশ মডেলিং, পরিকল্পনা ও ব্যবস্থাপনা
0 comments:
Post a Comment